|
Sia P(t) = ( x(t), y(t) ) la posizione che un oggetto ha (rispetto a un sistema
di coordinate x,y fissato) all'istante t (espresso in secondi assumendo
come riferimento un dato istante fissato).
Sappiamo che l'oggetto si muove lungo una
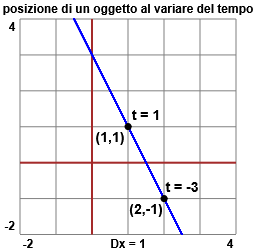
traiettoria rettilinea, che all'istante t = 1 ha la posizione P(1) = (1, 1)
e che all'istante t = −3
(ossia 3 secondi prima dell'istante scelto come riferimento) ha la posizione P(−3) = (2, −1).
1) Descrivi la traiettoria dell'oggetto mediante una coppia di equazioni:
x(t) = …
y(t) = …
2) Descrivila, poi, mediante una equazione del tipo y = f(x).
| |  |
In 4 secondi l'oggetto varia la x di −1 e la y di 2.
Quindi, per Δt = 1,
Δx = −1/4 e Δy = 1/2.
All'istante t = 0 l'oggetto è dunque in (1,1) − (−1/4, 1/2) = (5/4, 1/2).
Posso quindi descrivere il moto con x = 5/4 − t/4, y = 1/2 + t/2.
Controllo: per t = 1 ottengo x = 1, y = 1; per t = −3 ottengo x = 2, y = −1; OK.
Alternativa. Se l'oggetto fosse in (1,1) all'istante t = 0 il moto sarebbe:
x = 1 − t/4, y = 1 + t/2. Se traslo il tempo di 1 devo cambiare le equazioni in:
x = 1 − (t−1)/4, y = 1 + (t−1)/2 che, come si vede, equivalgono a quelle trovate nell'altro modo.
Equazione della retta. Retta per (1,1) con pendenza −2:
y = 1 − 2(x−1).
Controllo: per x = 1 y = 1, per x = 2 y = −1. OK
La figura è stata tracciata con questo script.