Le matrici
 A lato sono riprodotte due tabelle (quanto hanno speso tre persone per A e per B in due anni consecutivi) e
la tabella somma (quanto hanno speso, per A e per B, nel complesso dei due anni):
tabelle delle stesse dimensioni si possono sommare membro a membro, allo stesso modo
di come si fa per i
A lato sono riprodotte due tabelle (quanto hanno speso tre persone per A e per B in due anni consecutivi) e
la tabella somma (quanto hanno speso, per A e per B, nel complesso dei due anni):
tabelle delle stesse dimensioni si possono sommare membro a membro, allo stesso modo
di come si fa per i  vettori
nello spazio bidimensionale o nello
spazio tridimensionale. vettori
nello spazio bidimensionale o nello
spazio tridimensionale.
|
|
|
|
|
|
| tot | A | B |
| Tom |
| 81+88 | 17+19 | | 91+93 | 15+16 |
| 77+76 | 13+18 |
|
| Dick |
| Harry |
|
| 100 |
( |
81 17 | ) |
= | ( |
8100 1700 |
) |
| 91 15 | 9100 1500 |
| 77 13 | 7700 1300 |
| |
Come
nel caso dei vettori, possiamo moltiplicare tutti gli elementi di una tabella per un numero che, anche in questo caso,
chiamiamo scalare.
Tabelle di dati e operazioni di questi tipi su di esse sono spesso usate anche in statistica. Vediamo,
ora, qualche altro uso meno evidente.
|
Abbiamo considerato i
sistemi lineari a 2 equazioni e 2 incognite,
e abbiamo visto che il loro comportamento (in particolare quante soluzioni hanno e che cosa rappresentano
graficamente) dipende dalle relazioni che intervengono tra i vari coefficienti.
Ad esempio il sistema 4x+6y = 9 AND 2x+3y = 0
nelle incognite x ed y non ha soluzioni, mentre x+y = 0 AND 2x−y = 5
ha le soluzioni x = 5/3, y = −5/3.
|
I due sistemi possono essere riassunti con delle tabelle e delle operazioni tra esse
come quelle a fianco, che li fanno diventare simili a delle equazioni
di primo grado. Chiariamo il significato della operazione "×" (prodotto)
tra tabelle che compare. |
|
| ( |
4 6 | ) | × |
( | x | ) |
= |
( | 9 | ) |
|
( |
1 1 | ) |
× |
( | x | ) |
= |
( | 0 | ) |
| 2 3 | y |
0
| 2 −1 |
y | 5 |
|
Affinché vi sia una equivalenza con i sistemi di partenza
occorre che le espressioni precedenti siano uguali a quelle sottostanti.
| Quindi il "×"
tra una tabella 2×2 e una tabella 2×1
deve dar luogo a una tabella 2×1
la cui prima riga − 4x+6y, riferendoci al primo esempio − sia il frutto di una "moltiplicazione"
della riga "4 6" per la colonna "x y", e la cui seconda riga
− 2x+3y − sia il frutto di una "moltiplicazione"
della riga "2 3" per la colonna "x y". |
|
| ( |
4x + 6y | ) |
= |
( | 9 | ) |
|
( |
x + y | ) |
= |
( | 0 | ) |
| 2x + 3y |
0
| 2x − y |
5 |
|
Nel secondo esempio il prodotto della riga "1 1" per la
colonna "x y" diventa x+y, quello della riga "2 −1" per la colonna "x y" diventa
2x−y. In entrambi i casi abbiamo inteso il prodotto "riga × colonna"
come il prodotto scalare "·" ( vettori)
tra la riga e la colonna in questione.
| In modo analogo, il sistema a 3 equazioni e 3 incognite 4x+6y−2z = 9 AND
2x+3y+z = 0 AND x−5y+2z = −7 può essere rappresentato
nel modo a destra. Il termine a sinistra della seconda equazione del sistema, ad esempio, può essere
ottenuto moltiplicando la riga (2 3 1) per la colonna (x y z). |
|
| ( |
4 6 −2 | ) |
× |
( |
x | ) |
= |
( | 9 | ) |
| 2 3 1 |
y |
0 |
| 1 −5 2 |
z |
−7 |
|
Ricordiamo che i sistemi lineari (come già ricordato) possono essere risolti facilmente
con lo script "sistemi di equazioni" (vedi qui):
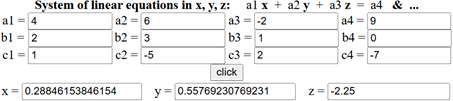
Se volessi i risultati sotto forma di frazione potrei usare lo script "frazioni":
28/100 + 846153/99999900 → 15/52
55/100 + 76923/9999990 → 29/52
225/100 → 9/4
Ovvero posso usare WolframAlpha:

Le tabelle, dotate di queste operazioni di addizione, di prodotto
per una scalare e di moltiplicazione, vengono chiamate matrici. Ovviamente occorre
tener conto che due matrici per essere sommate devono avere la stessa dimensione (nel primo
esempio erano entrambe 3×1), in modo da
poter sommare gli elementi che, nelle due matrici, stanno nello stesso posto. E che per essere
moltiplicate devono avere la prima tante colonne quante righe ha la seconda (nell'ultimo
esempio una era 3×3, l'altra 3×1, e ho
moltiplicato, ad esempio, la riga 2 3 1, costituita da 3 colonne, per la colonna
x y z, costituita da 3 righe).
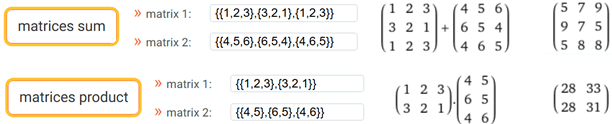
Tutti i calcoli che coinvolgono le matrici possono essere svolti facilmente con
WolframAlpha.
Qui una banca di esempi.
Se (aperto WolframAlpha) digiti "matrices sum" e "matrices product"
puoi eseguire facilmente somme e prodotti di matrici.
|
Facciamo, ancora, due esempi.
Il valore calorico di proteine, grassi e glucidi è, rispettivamente, 4.1, 9.3 e 4.1 kcal/g
(valori arrotondati).
La tabella A indica, approssimativamente, la percentuale (ovvero il numero di grammi per 100 grammi di sostanza)
di proteine, grassi e glucidi (1ª, 2ª, 3ª colonna) dei gamberetti e
della maionese che una azienda impiega per produrre un particolare tipo di alimento. Che cosa rappresenta
il prodotto A×B?
|
|
| A = |
 |
8 | | 1 | | 55 |
 |
| 14 | 1 | 3 |
|
| B = |
 |
4.1 |
 | | 9.3 | | 4.1 |
|
| A×B = |
|
8·4.1+1·9.3+55·4.1 |
|
| 14·4.1+1·9.3+3·4.1 |
|
| = |
|
267.6 |
|
| 79.0 |
|
| Le righe della tabella prodotto (che è una tabella
2×1, essendo ottenuta moltiplicando una tabella 2×3 con una 3×1),
che posso approssimare a 270 e 80,
rappresentano, in questo caso, il totale delle chilocalorie fornite da 1 hg di ciascuna sostanza. |
| Come altro esempio pensiamo alle rotazioni attorno all'origine,
limitandoci, per semplicità al caso piano. Le rotazioni di multipli di 90°
( numeri complessi)
è facile descriverle usando le matrici: a destra è descritta la rotazione di −90°.
Più in generale è facile descrivere mediante matrici una qualunque rotazione ampia
α attorno all'origine: |
|
| ( |
0 −1 | ) | × |
( | x | ) |
= |
( | y | ) |
| 1 0 | y |
−x |
|
 |
(clicca l'immagine
per ingrandirla) |
|
Infatti (come permette di dedurre la figura precedente, e come si può vedere alla voce
numeri complessi)
il punto (1,0) viene trasformato nel punto (cos(α), sin(α)),
il punto (0,1) viene trasformato nel punto (−sin(α), cos(α))
e, in generale, il punto (x,y) viene trasformato nel punto rappresentato vettorialmente
a destra.
|
|
| |
cos(α) −sin(α) |
| × |
| x | |
= |
| x·cos(α) − y·sin(α) | |
|
sin(α) cos(α) |
y |
x·sin(α) + y·cos(α)
|
|
|
Sotto, a sinistra è illustrato come viene trasformato il punto (2,3) da una rotazione di 75°
attorno all'origine e, a destra, come si possono individuare le sue coordinate moltiplicando
il vettore che lo rappresenta per la matrice che rappresenta la rotazione di 75°.
|
 |
| |
cos(75°) −sin(75°) |
| × |
| 2 | |
= |
| 2·cos(75°) − 3·sin(75°) | |
= |
| 2.380… | |
|
sin(75°) cos(75°) |
3 |
2·sin(75°) + 3·cos(75°)
| 2.708… |
|
Sottoporre un punto a due rotazioni, α e β, attorno all'origine equivale a ruotarlo una sola
volta di una quantità pari alla somma, α+β, delle due rotazioni. Formalizzando
queste considerazioni si arriva a dimostrare che
A×(B×C) = (A×B)×C,
ossia che per il prodotto tra matrici vale la proprietà associativa
( strutture
numeriche e non). Non vale, invece la proprietà commutativa,
anzi, non è detto che se si può fare A×B si possa fare anche B×A:
basta, ad esempio, che A sia 2×3 e B sia 3×1.
Per completare, almeno ad un primo livello, le considerazioni sulle matrici occorre
mettere a punto i concetti di matrice identità e di matrice inversa.
Ciò ci permetterà,
ad esempio, di trovare un modo di risolvere in forma compatta sistemi come
quelli considerati sopra ( ).
Per mettere a punto questi concetti ci soffermiamo sulle matrici quadrate,
ossia sulle matrici che hanno tante colonne quante le righe.
).
Per mettere a punto questi concetti ci soffermiamo sulle matrici quadrate,
ossia sulle matrici che hanno tante colonne quante le righe.
Una matrice identità è una matrice quadrata che
ha 1 come elementi che stanno sulla diagonale che parte dal primo posto della prima riga
e ha 0 come altri elementi.
Data una matrice M, viene chiamata sua matrice inversa, e indicata M−1,
una matrice che moltiplicata a destra o a sinistra per M dà la matrice identità.
Ad esempio abbiamo:
| I = |
|
1 | | 0 |
|
| 0 | 1 |
|
|
| A = |
|
1 | | 2 |
|
| −1 | 0 |
|
|
| B = |
|
0 | | −1 |
|
| 1/2 | 1/2 |
|
|
|
|
|
|
|
|
|
Infatti, se data una matrice M indichiamo con
m i, j
il suo elemento che sta nella riga i-esima e nella colonna j-esima, abbiamo che
l'elemento di posto 1,1 di A×B è
a 1,1 b 1,1
+
a 1,2 b 2,1
=
1·0+2·1/2 = 1 (riga e colonna evidenziate in giallo), quello di posto 1,2 è
a 1,1 b 1,2
+
a 1,2 b 2,2
=
1·(−1)+2·1/2 = 0, quello di posto 2,1 è
a 2,1 b 1,1
+
a 2,2 b 2,1
=
−1·0+0·1/2 = 0, quello di posto 2,2 è
a 2,1 b 1,2
+
a 2,2 b 2,2
=
−1·(−1)+0·1/2 = 1.
La matrice nulla (tutti gli elementi uguali a 0) ovviamente non ha
l'inversa, ma non ce l'ha, ad esempio, anche la seguente matrice A:
| A = |
|
4 | | 6 |
|
| 2 | 3 |
|
|
| B = |
|
x | | y |
|
| u | v |
|
|
| A×B = |
|
2h | | 2k |
|
≠ |
| h | k |
|
| |
1 | | 0 |
|
| 0 | 1 |
| |
|
Infatti, qualunque sia B, A×B ha la prima riga pari al doppio della seconda,
e quindi non può essere uguale ad I.
È facile verificare (facendo il prodotto) che, se A è
una matrice quadrata 2×2, la sua matrice inversa è data
dalla seguente formula:
Nel primo caso considerato in questo paragrafo ritroviamo facilmente
che A−1 = B. Nel secondo caso troveremmo
a·d − b·c = 12−12 = 0, a conferma che questa
A−1 non può essere individuata, ossia che A
non ha inversa.
Se proviamo con WolframAlpha per la seconda matrice A otteniamo il messaggio che non ha inversa nella forma
"matrix is singular". Per calcolare a·d − b·c utilizziamo il secondo comando sotto riportato:
 Il numero
a·d − b·c,
la cui diversità da zero individua le matrici 2×2 invertibili, viene chiamato
determinante, e indicato det(A).
Se scambio due righe (metto la prima al posto della seconda,
e viceversa) o se scambio due colonne, ho immediatamente che il determinante cambia (solo) il segno; se faccio
entrambe le cose, cambio due volte il segno, e il determinate rimane immutato.
Se scambio righe con colonne il determinante diventa a·d − c·b,
ossia un termine equivalente al precedente: il suo valore rimane lo stesso.
Il numero
a·d − b·c,
la cui diversità da zero individua le matrici 2×2 invertibili, viene chiamato
determinante, e indicato det(A).
Se scambio due righe (metto la prima al posto della seconda,
e viceversa) o se scambio due colonne, ho immediatamente che il determinante cambia (solo) il segno; se faccio
entrambe le cose, cambio due volte il segno, e il determinate rimane immutato.
Se scambio righe con colonne il determinante diventa a·d − c·b,
ossia un termine equivalente al precedente: il suo valore rimane lo stesso.
Per inciso notiamo che, data una qualunque matrice A, la matrice ottenuta da essa scambiando
le righe con le colonne si chiama trasposta di A.
È immediato verificare
( direz. e funz. circolari)
che le rotazioni sono rappresentate
da matrici con determinante 1, così come, ad esempio, le simmetrie rispetto all'asse x o all'asse y.
È un po' noioso, ma non difficile, generalizzare
questi concetti e queste proprietà a matrici quadrate di qualsiasi ordine.
Vediamo come definire il determinante delle
matrici 3×3, che abbiamo già introdotto in un caso particolare considerando le proprietà dei vettori
nello spazio tridimensionale:
| si calcola il prodotto del primo elemento della prima riga
per il determinante della matrice 2×2 che si ottiene eleminando la prima riga e la prima colonna;
a questo si aggiunge, cambiato di segno, il prodotto del secondo elemento della prima riga
per il determinante della matrice che si ottiene eleminando la prima riga e la seconda colonna;
a questo si aggiunge, non cambiato di segno, il prodotto del terzo elemento della prima riga
per il determinante della matrice che si ottiene eleminando la prima riga e la terza colonna.
In breve, nel caso della matrice A a lato:
|
| A = |
|
1 −1 3 |
|
| 1 0 −1 |
| 2 1 6 |
|
det(A) =
1·det(0,−1; 1,6) −
(−1)·det(1,−1; 2,6)
+ 3·det(1,0; 2,1) =
1·(0−(−1)) −
(−1)·(6−(−2))
+ 3·(1−0) = 1+8+3 = 12
Volendo, potevo scambiare la prima e la seconda riga, ossia studiare la matrice
a fianco. Il suo determinante è:
det(B) = 1·det(−1,3; 1,6) +
(−1)·det(1,−1; 2,1)
= −9 − 3 = −12.
A causa dello scambio, come nel caso 2×2, si ha un cambio segno: det(A) = −det(B) = 12.
|
| B = |
|
1 0 −1 |
|
| 1 −1 3 |
| 2 1 6 |
|
Nel caso di una matrice 4×4, come quella a lato,
si procede in modo simile:
det(A) = 2·det(1,0,−1; 2,1,6; 2,0,−2)
− 1·det(3,0,−1; 4,1,6; 6,0,−2)
+ (−1)·det(3,1,−1; 4,2,6; 6,2,−2)
− 3·det(3,1,0; 4,2,1; 6,2,0)
det(1,0,−1; 2,1,6; 2,0,−2) =
1·det(1,6; 0,−2)
− 0·det(…)
+ (−1)·det(2,1; 2,0)
= −2 + 0 + 2 = 0
ecc.
|
| A = |
 |
2 1 −1 3 |
 |
| 3 1 0 −1 |
| 4 2 1 6 |
| 6 2 0 −2 |
|
| Ma si può scambiare posto alla 2ª e alla 4ª
in modo da ricondursi alla matrice B a fianco, le cui ultime due righe sono proporzionali.
Si può concludere che il determinante è nullo.
Infatti i determinanti delle matrici 2×2 delle ultime due righe sono nulli e da questo si ricava che
sono nulli anche quelli delle matrici 3×3 delle ultime tre righe e, quindi, anche quello
della matrice 4×4.
Anche se avessi trovato due colonne proporzionali avrei potuto concludere che il determinante
è nullo: scambiando righe e colonne, infatti, il determinante non cambia. Per inciso
osserviamo che quando due righe o due colonne U e V di una matrice, o due vettori U e V,
sono proporzionali, ossia quando esiste un numero reale h tale che U = h V,
si dice che U e V sono linearmente dipendenti. La cosa può essere generalizzata a tre o più vettori:
U, V e W sono linearmente dipendenti quando uno di essi, ad esempio U, può essere espresso come
h V +k W.
|
| B = |
|
2 1 −1 3 |
|
| 4 2 1 6 |
| 3 1 0 −1 |
| 6 2 0 −2 |
|
Con WolframAlpha, battendo det{{2,1,-1,3},{3,1,0,-1},{4,2,1,6},{6,2,0,-2}} otterremmo 0.
Esercizio e
soluzione
Vediamo, infine, come applicare questi concetti alla soluzione dei sistemi lineari.
I sistemi lineari a 2 equazioni e due incognite considerati
sopra possono essere
riscritti nella forma A×X = B, dove con A abbiamo indicato la matrice
2×2 dei coefficienti di grado 1 e con B la marice 2×1 dei termini noti, mentre con X abbiamo
indicato la matrice 2×1 delle incognite.
|
|
|
|
Se moltiplichiamo a sinistra entrambi i membri (che sono
equivalenti a matrici 2×1) per A−1 abbiamo l'esito
a fianco. Ma nel primo caso A ha determinante 0 in quanto la prima riga, (4 6),
è proporzionale alla seconda, (2 3), per cui l'operazione non
si può fare, e il sistema non ha soluzioni.
Nel secondo caso, invece, ritroviamo: |
|
X = A−1×B |
|
|
|
|
| |
2 | | −1 |
|
| 1 | 1 |
|
|
X = |
|
|
| |
2 | | −1 |
|
| 1 | 1 |
| × |
| |
0 |
|
| 5 |
|
= |
| |
5/3 |
|
| −5/3 |
|

Nel caso del sistema a lato, possiamo metterlo
in forma matriciale A×X = B dove A è
la matrice 4×4 considerata nel paragrafo precedente.
La matrice A ha, come abbiamo visto alla fine del paragrafo precedente, determinante nullo, quindi
non riesco a trasformare il sistema esplicitando un'unica
quaterna (x, y, z, w) di soluzioni.
Siamo come nel caso a x = b con a = 0:
le soluzioni possono essere infinite (0·x = 0), o nessuna (0·x = 3).
|
|
| { |
2x + y − z + 3w = 4 |
| 3x + y − w = −2 |
| 4x + 2y + z + 6w = √3 |
| 6x + 2y − 2w = 3/7 |
|
|
| |
x |
|
= ? |
| y |
| z |
| w |
|
Nel nostro caso abbiamo una situazione analoga:
A×X = B con det(A) = 0. In questo caso
stabilire se le soluzioni sono infinite o nessuna è un po' meno "automatico".
Qui ci fermiamo senza sviluppare l'argomento, che potrà affrontare
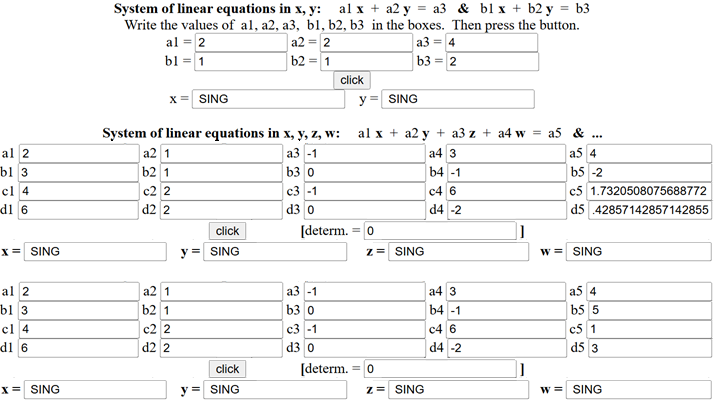
chi proseguirà in studi di tipo scientifico. Vediamo solo come affrontare tali questioni con WolframAlpha e con lo script "sistemi equazioni".
WolframAlpha ci informa se non esistono soluzioni o ci fornisce sottoforma di equazione le infinite soluzioni:


Lo script indica con "SING" (sistema "singolare") tutti i casi in cui non c'è una sola soluzione:
Esercizio e
soluzione
Notiamo che la parte della matematica che si occupa di sistemi lineari, vettori e
matrici viene chiamata algebra lineare. Il nome deriva dal
termine inglese line che significa "retta" (mentre il termine italiano "linea"
comprende anche le curve). Le equazioni lineari
a x + b y + c = 0
in due variabili rappresentano rette; con i sistemi di due equazioni lineari di due variabili
si possono rappresentare le intersezioni di coppie di rette, e quindi i punti.
Le equazioni lineari in tre variabili,
a x + b y + c z + d = 0,
rappresentano piani (vedi); con i sistemi di due equazioni lineari di tre variabili
si possono rappresentare le intersezioni di coppie di piani, e quindi le rette.
Esercizio 1 sol.
Esercizio 2 sol.
Esercizio 3 sol.
Esercizio 4 sol.
Esercizio 5 sol.
Esercizio 6 sol.
Esercizio 7 sol.
Esercizio 8 sol.